Note
Go to the end to download the full example code
John Reid pendulum example#
This example is inspired by John Reid’s “Pendulum” example on the LS-DYNA Examples site. It shows how to use DYNA-Lib to create a keyword file for LS-DYNA and solve it within a Pythonic environment.
Perform required imports#
Import required packages, including those for the keywords, deck, and solver.
Create a deck and keywords#
Create a deck, which is the container for all the keywords. Then, create and append individual keywords to the deck.
def write_deck(filepath):
deck = Deck()
# Append control keywords
deck.extend(
[
kwd.ControlTermination(endtim=11.0),
kwd.ControlEnergy(hgen=2, rwen=2),
kwd.ControlOutput(npopt=1, neecho=3),
kwd.ControlShell(istupd=1, theory=2),
]
)
# Append database keywords
deck.extend(
[
kwd.DatabaseBinaryD3Plot(dt=1.00),
kwd.DatabaseExtentBinary(ieverp=1),
kwd.DatabaseBinaryD3Thdt(dt=999999),
kwd.DatabaseGlstat(dt=0.10),
kwd.DatabaseMatsum(dt=0.10),
kwd.DatabaseNodout(dt=0.10),
kwd.DatabaseHistoryNode(id1=350, id2=374, id3=678, id4=713),
kwd.DatabaseRbdout(dt=0.10),
kwd.DatabaseRcforc(dt=0.10),
]
)
# Define contacts
deck.extend([kwd.ContactAutomaticSingleSurface(ssid=0, fs=0.08, fd=0.08), kwd.ControlContact(shlthk=2)])
# Define gravity
curve1 = kwd.DefineCurve(lcid=1)
curve1.curves = pd.DataFrame({"a1": [0.00, 10000.00], "o1": [1.000, 1.000]})
deck.extend([kwd.LoadBodyY(lcid=1, sf=0.00981), curve1])
# Define boundary conditions
# BoundarySpcNode edited needs to redo code gen
BoundarySpcNode = kwd.BoundarySpcNode()
BoundarySpcNode.nodes = pd.DataFrame(
{
"nid": [45004, 45005, 45010, 45011],
"cid": [0, 0, 0, 0],
"dofx": [1, 1, 1, 1],
"dofy": [1, 1, 1, 1],
"dofz": [1, 1, 1, 1],
"dofrx": [0, 0, 0, 0],
"dofry": [0, 0, 0, 0],
"dofrz": [0, 0, 0, 0],
}
)
deck.extend(
[
BoundarySpcNode,
kwd.InitialVelocity(boxid=5, vx=0.0, vy=-12.0, vz=0.0),
kwd.DefineBox(boxid=5, xmn=-120.0, xmx=-80.0, ymn=80.0, ymx=120.0, zmn=-30.0, zmx=30.0),
]
)
# Define parts and materials
spherePart = kwd.Part()
spherePart.parts = pd.DataFrame({"heading": ["sphere1", "sphere2"], "pid": [1, 2], "secid": [1, 2], "mid": [1, 1]})
beamPart = kwd.Part()
beamPart.parts = pd.DataFrame(
{"heading": ["Pendulum Wires - Elastic Beams"], "pid": [45], "secid": [45], "mid": [45]}
)
deck.extend(
[
spherePart,
# Aluminium
kwd.MatPlasticKinematic(mid=1, ro=2.7e-6, e=68.9, pr=0.330, sigy=0.286, etan=0.00689),
# Sections
kwd.SectionShell(secid=1, elfrom=2, t1=1.0, t2=1.0, t3=1.0, t4=1.0),
kwd.SectionShell(secid=2, elfrom=2, t1=1.0, t2=1.0, t3=1.0, t4=1.0),
# Pendu Wires
beamPart,
kwd.SectionBeam(secid=45, elform=3, shrf=1.00000, qr_irid=1.0, a=10.0),
kwd.MatElastic(mid=45, ro=7.86e-6, e=210.0, pr=0.30),
]
)
# Define deformable switching
deck.extend([kwd.DeformableToRigid(pid=1), kwd.DeformableToRigid(pid=2)])
# Define nodes and elements
deck.extend([kwd.Include(filename="nodes.k")])
deck.export_file(filepath)
return deck
def run_post(filepath):
pass
deck = write_deck(os.path.join(dynadir, dynafile))
shutil.copy("nodes.k", "run/nodes.k")
'run/nodes.k'
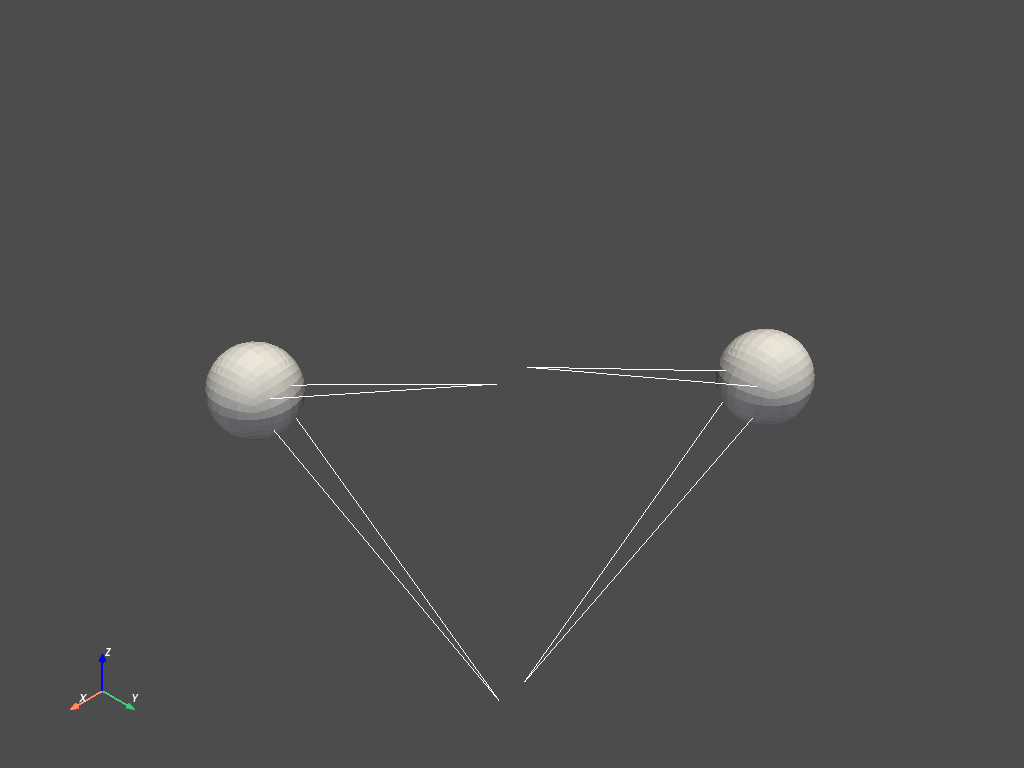
View the model#
You can use the PyVista plot method in the deck class to view
the model.
out = deck.plot(cwd=dynadir)
Run the Dyna solver#
Total running time of the script: (0 minutes 1.015 seconds)