Note
Go to the end to download the full example code
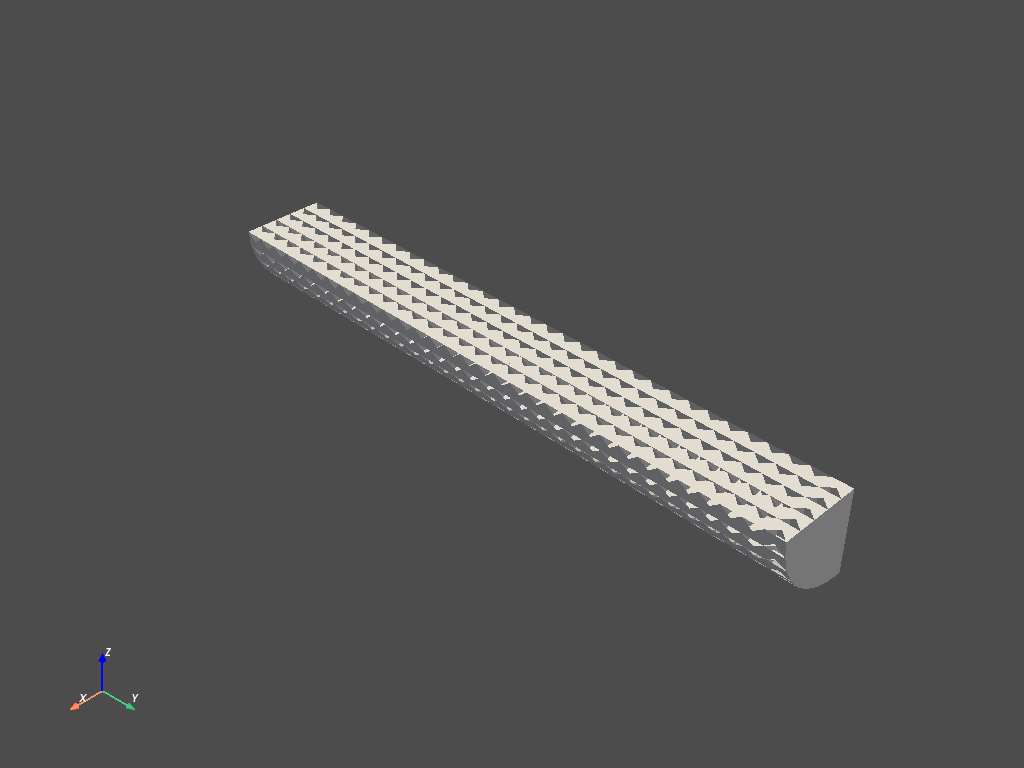
Taylor bar example#
This example is inspired by the “Taylor Bar” example on the LS-DYNA Examples site. It shows how to use DYNA-Lib to create a keyword file for LS-DYNA and solve it within a Pythonic environment.
Perform required imports#
Import required packages, including those for the keywords, deck, and solver.
# sphinx_gallery_thumbnail_number = 1
import datetime
import os
import tempfile
import time
import matplotlib.pyplot as plt
import pandas as pd
from ansys.dyna import examples
from ansys.dyna.keywords import Deck
from ansys.dyna.keywords import keywords as kwd
from ansys.dyna.run import run_dyna
Import DPF-Core#
Import the PyDPF-Core package.
Create a deck and keywords#
Create a deck, which is the container for all the keywords. Then, create and append individual keywords to the deck.
def create_input_deck(**kwargs):
initial_velocity = kwargs.get("initial_velocity")
wd = kwargs.get("wd")
if not all((initial_velocity, wd)):
raise Exception("Missing input!")
deck = Deck()
deck.title = "Taylor-Bar Velocity - %s - Unit: t-mm-s" % initial_velocity
# Import mesh
mesh = examples.taylor_bar_mesh
include1 = kwd.Include(filename=mesh)
# Define material
mat_1 = kwd.Mat003(mid=1)
mat_1.ro = 7.85000e-9
mat_1.e = 150000.0
mat_1.pr = 0.34
mat_1.sigy = 390.0
mat_1.etan = 90.0
# Define section
sec_1 = kwd.SectionSolid(secid=1)
sec_1.elform = 1
# Define part
part_1 = kwd.Part()
part_1.parts = pd.DataFrame({"pid": [1], "mid": [mat_1.mid], "secid": [sec_1.secid]})
# Define coordinate system
cs_1 = kwd.DefineCoordinateSystem(cid=1)
cs_1.xl = 1.0
cs_1.yp = 1.0
# Define initial velocity
init_vel = kwd.InitialVelocityGeneration()
init_vel.id = part_1.parts["pid"][0]
init_vel.styp = 2
init_vel.vy = initial_velocity
init_vel.icid = cs_1.cid
# Define box for node set
box_1 = kwd.DefineBox(boxid=1, xmn=-500, xmx=500, ymn=39.0, ymx=40.1, zmn=-500, zmx=500)
# Create node set
set_node_1 = kwd.SetNodeGeneral()
set_node_1.sid = 1
set_node_1.option = "BOX"
set_node_1.e1 = box_1.boxid
# Define rigid wall
rw = kwd.RigidwallPlanar(id=1)
rw.nsid = set_node_1.sid
rw.yt = box_1.ymx
rw.yh = box_1.ymn
# Define control termination
control_term = kwd.ControlTermination(endtim=8.00000e-5, dtmin=0.001)
# Define database cards
deck_dt_out = 8.00000e-8
deck_glstat = kwd.DatabaseGlstat(dt=deck_dt_out, binary=3)
deck_matsum = kwd.DatabaseMatsum(dt=deck_dt_out, binary=3)
deck_nodout = kwd.DatabaseNodout(dt=deck_dt_out, binary=3)
deck_elout = kwd.DatabaseElout(dt=deck_dt_out, binary=3)
deck_rwforc = kwd.DatabaseRwforc(dt=deck_dt_out, binary=3)
deck_d3plot = kwd.DatabaseBinaryD3Plot(dt=4.00000e-6)
# Define deck history node
deck_hist_node_1 = kwd.DatabaseHistoryNodeSet()
deck_hist_node_1.id1 = set_node_1.sid
# Append all cards to input deck
deck.extend(
[
deck_glstat,
deck_matsum,
deck_nodout,
deck_elout,
deck_rwforc,
deck_d3plot,
set_node_1,
control_term,
rw,
box_1,
init_vel,
cs_1,
part_1,
mat_1,
sec_1,
deck_hist_node_1,
include1,
]
)
deck_string = deck.write()
# Create LS-DYNA input deck
os.makedirs(wd, exist_ok=True)
file_handle = open(os.path.join(wd, "input.k"), "w")
file_handle.write(deck_string)
file_handle.close()
return deck
Define the Dyna solver function#
def run(**kwargs):
wd = kwargs.get("wd")
inputfile = os.path.join(wd, "input.k")
run_dyna(inputfile)
assert os.path.isfile(os.path.join(wd, "d3plot"))
assert os.path.isfile(os.path.join(wd, "lsrun.out.txt"))
Define the DPF output function#
def get_global_ke(**kwargs):
wd = kwargs.get("wd")
ds = dpf.DataSources()
ds.set_result_file_path(os.path.join(wd, "d3plot"), "d3plot")
model = dpf.Model(ds)
ts = [set for set in range(1, model.metadata.time_freq_support.n_sets + 1)]
ke_op = model.results.global_kinetic_energy(time_scoping=ts)
time = model.metadata.time_freq_support.time_frequencies.data_as_list
ke = []
for t in ts:
ke.append(ke_op.outputs.global_kinetic_energy.get_data()[t - 1].data[0])
return time, ke
# Define base working directory
root_out_dir = tempfile.gettempdir()
stamp = datetime.datetime.fromtimestamp(time.time()).strftime("%Y-%m-%d_%H_%M_%S")
base_wd = os.path.join(root_out_dir, "PyDyna.%s" % stamp)
os.mkdir(base_wd)
View the model#
etc etc TODO Need to support solids for this to work
deck_for_graphic = create_input_deck(initial_velocity=300e3, wd="run")
# print(deck_for_graphic.expand())
deck_for_graphic.plot(cwd="run")
Run a parametric solve#
etc etc
color = ["b", "r", "g", "y"]
# Specify different velocities in mm/s
initial_velocities = [275.0e3, 300.0e3, 325.0e3, 350.0e3]
for index, initial_velocity in enumerate(initial_velocities):
# Create a folder for each parameter
wd = os.path.join(base_wd, "tb_vel_%s" % initial_velocity)
os.mkdir(wd)
# Create LS-Dyna input deck
create_input_deck(initial_velocity=initial_velocity, wd=wd)
# Run Solver
try:
run(wd=wd)
# Run PyDPF Post
if HAS_DPF:
time, ke = get_global_ke(initial_velocity=initial_velocity, wd=wd)
# Add series to the plot
plt.plot(time, ke, color[index], label="KE at vel. %s mm/s" % initial_velocity)
except Exception as e:
print(e)
# sphinx_gallery_defer_figures
plt.xlabel("Time (s)")
plt.ylabel("Energy (mJ)")
Text(0, 0.5, 'Energy (mJ)')
Generate graphical output#
etc etc
plt.show()
Total running time of the script: (0 minutes 27.933 seconds)